Mover6
6-axis robot arm for research and development
The Mover6 has a 6-axis kinematics and thus allows the movement of the gripper in all 6 degrees of freedom!
With the Mover6, realistic automation scenarios can be simulated. It can be used as a motion platform and combines physics, mathematics and computer science with tangible reality.
Various tools can be attached to the front of the robot, such as shovels, electromagnets or grippers. With a movement radius of 60 cm, the robot can lift objects weighing 400 g.
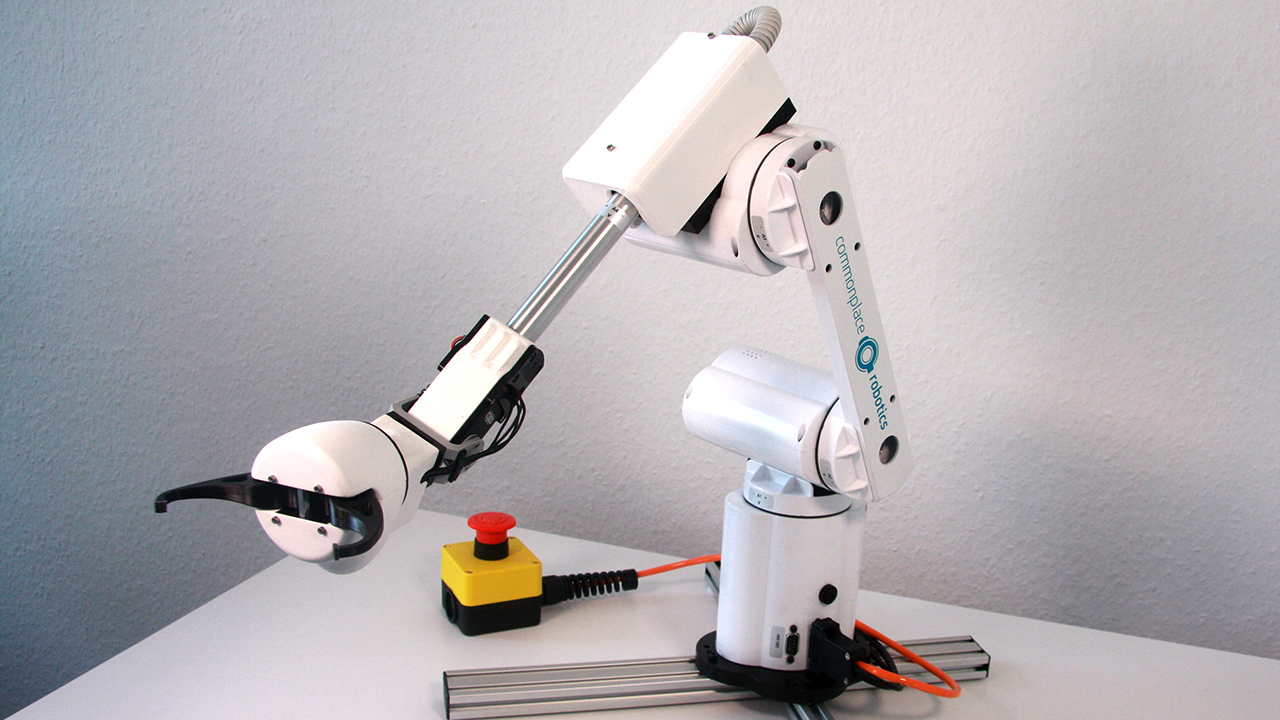
Mover5
5-axis robot arm for research and development

The Mover5 has a 5-axis kinematics and thus allows the movement of the gripper in 5 degrees of freedom!
With the Mover5, realistic automation scenarios can be simulated. It can be used as a motion platform and combines physics, mathematics and computer science with tangible reality.
The robot arm has five serial axes and can therefore move in space and tilt the hand at an angle. Furthermore it can turn the mounted tool around it’s own axis. Various tools can be attached to the front of the robot, including shovels, electromagnets and grippers. With a movement radius of 55 cm, the robot can lift objects weighing 500 g.
Mover4
4-axis robot arm for research and development

The Mover4 has a 4-axis kinematics and thus allows the movement of the gripper in 4 degrees of freedom!
With the Mover4, realistic automation scenarios can be simulated. It can be used as a motion platform and combines physics, mathematics and computer science with tangible reality.
The robot arm has four serial axes and can therefore move in space and tilt the hand at an angle. Various tools can be attached to the front of the robot, including shovels, electromagnets and grippers. With a movement radius of 55 cm, the robot can lift objects weighing 500 g.
ROS Packages
Packages for the Robot Operating System
In the Robot Operating System, www.ros.org, the robotics community focuses great efforts.
We provide hardware driver to allow an easy integration of the CPR robots into a ROS environment.
Source Code: Packages can be found on github:
www.github.com/CPR-Robots
They contain hardware interfaces, RViz teleop plugins and MoveIt example setups.
The sources are in constant development, please get to us if you miss functionality!